

来源:康复医学科
时间:2023-05-22
浏览量:
分享:
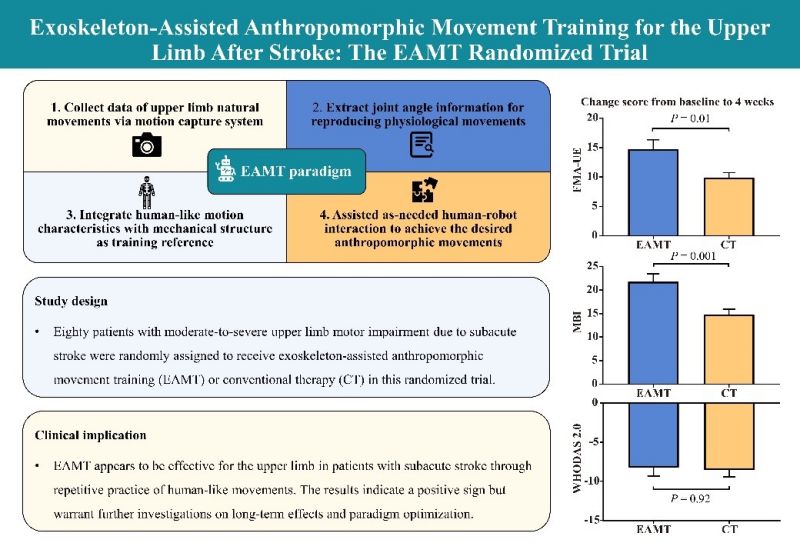
近日,华中科技大学同济医学院附属同济医院康复医学科在国际卒中领域顶级期刊《Stroke》发表研究论文,题为“Exoskeleton-Assisted Anthropomorphic Movement Training for the Upper Limb After Stroke: The EAMT Randomized Trial”。康复医学科博士研究生陈泽健为论文第一作者,黄晓琳教授为通讯作者。《Stroke》杂志是美国卒中协会(American Stroke Association)的官方杂志。该期刊在2021年JCR影响因子为10.170,CiteScore为16.20,SJR指标为3.245,是中科院一区TOP期刊。
脑卒中康复需要足够强度的任务导向训练,近些年来随着人工智能和机器人技术的发展,上肢机器人已成为卒中康复领域临床和研究热点,能为患者提供可重复性、交互式、趣味性良好的任务导向性训练。多年来康复医学科科与华科机械学院、医疗装备学院在机器人领域进行了广泛深入合作与学科交叉融合,并组建了医工结合研究团队。该团队从运动学习理论切入,认为机器人疗效基于活动依赖可塑性,这要求训练活动本身应该具有代表性,最好跟患者日常活动息息相关,而且运动轨迹应当尽可能符合人体运动规律。围绕脑卒中上肢康复机器人,既往在美国康复医学会会刊Arch Phys Med Rehabil、IEEE旗下期刊IEEE Trans Neural Syst Rehabil Eng等发表了多项合作成果,该文章是团队的最新研究成果。
该研究通过提取正常人体上肢运动学数据,采用高维数据特征提取将动作模式进行复现,使机器人在多关节自由度的姿态、轨迹上模拟人体运动规律。在双中心临床试验研究中发现新型的外骨骼辅助拟态运动训练4周后的平均Fugl-Meyer上肢评估变化高于传统疗法。此外,中度运动障碍的患者亚组(FMAUE 23-38 分)更能从机器人训练中获益。该研究为脑卒中上肢功能康复提供了一种新型的机器人辅助训练方式,为提升康复机器人临床疗效提供了新的思路,使脑卒中患者能对更加自然、生理的运动进行学习,从而诱导有效的神经可塑性发生,同时也为未来机器人领域基础与临床研究提供了更多的可能。同时,研究也提出还需在未来不断提高康复机器人拟人运动种类和个体化程度,优化人机交互策略和机械结构,进一步理解干预背后的神经机制。
针对本研究,两位同行评议审稿专家分别认为“This trial includes many promising features”以及“The results are exciting... This is interesting both in terms of the development of a new, more effective, rehab intervention, and also in that it suggests that the degree of how similar to physiologically ‘normal’ a rehab exercise movement is may affect how effective that movement is at promoting recovery (which could inspire further basic and clinical research)”。此外,Stroke杂志编辑部特邀国际神经病学领域Bruce H. Dobkin等专家为本研究撰写题为“Upper Extremity Robotic-Assisted Rehabilitation: Results Not Yet Robust”的社论,提出不同脑网络保留程度卒中病人对机器人干预的敏感性、机器人视听反馈的运动学习机制、设定合理的运动学参数用于治疗进阶,以及本研究所提出的“拟人/人形”机器人理念等,均是未来可以继续深入研究的方向。技术革新与学科交叉为康复机器人领域留下了无限的遐想空间,但同时也应该清楚地认识到,医工结合的基础与临床研究尤其是康复机器人研究依旧任重道远,需要继续对其科学原理进行深入探索、不断提高机器人的临床疗效。
医工结合助力脑卒中康复-我院康复机器人研究成果发表于《Stroke》杂志

 鄂公网安备 42010402000284号
鄂公网安备 42010402000284号



鄂公网安备 42010402000284号


